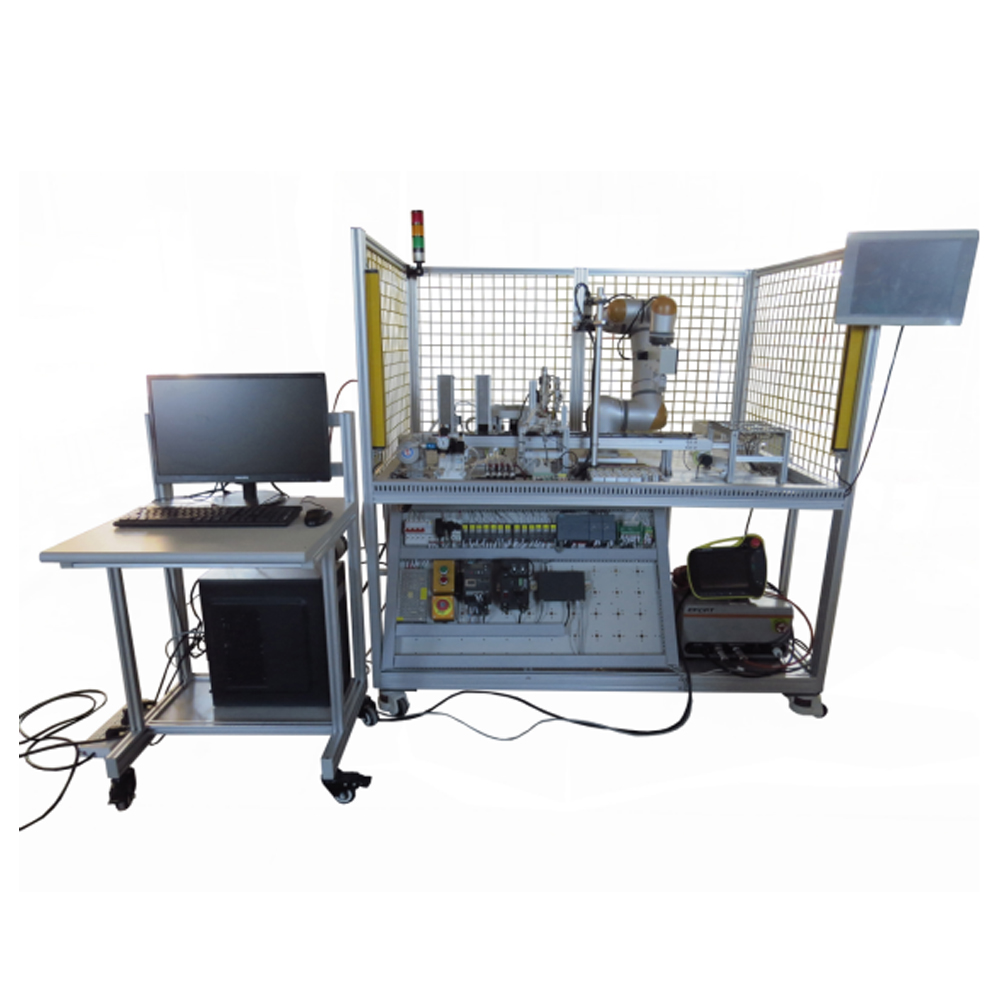
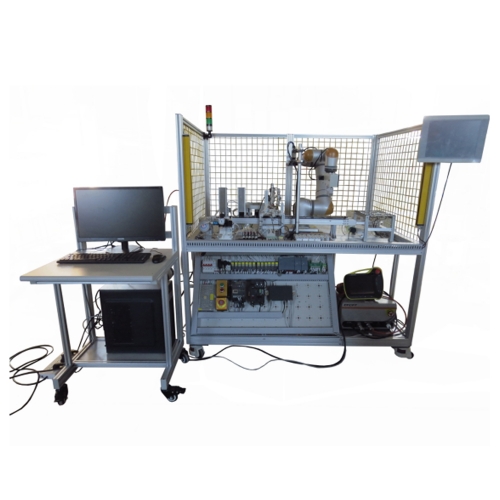
Brazo robótico colaborativo de 6 ejes con cámara y pinza Equipo de formación profesional Equipo de formación en mecatrónica
Artículo No.: AFM012R
Brazo robótico colaborativo de 6 ejes con cámara y pinza Equipo de formación profesional Equipo de formación en mecatrónica